 Get in touch
Get in touch

1. Inleiding: deconstructie van de paardenkracht van AC-inductiemotoren De AC-inductiemotor is een van de m...
LEES MEERNieuws
2025-09-23
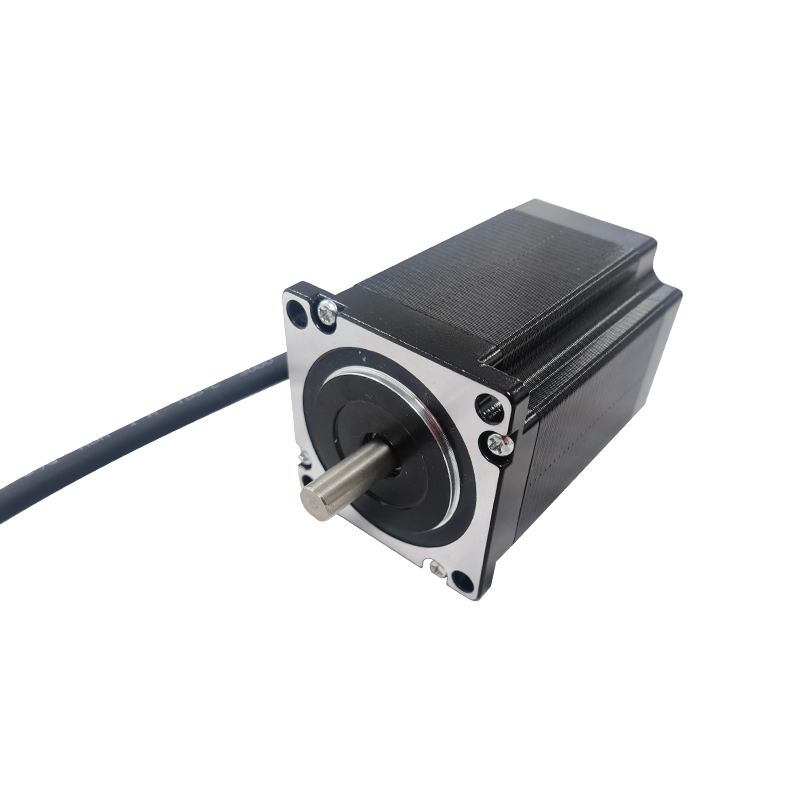
Stappenmotoren vormen een hoeksteen van moderne bewegingscontrole en bieden nauwkeurige positionering en herhaalbaarheid zonder de noodzaak van complexe feedbacksystemen. Deze borstelloze, synchrone elektromotoren zetten digitale pulsen om in nauwkeurige mechanische asrotaties, waarbij ze in discrete stappen bewegen. Deze eigenschap maakt ze onmisbaar in toepassingen variërend van consumentenelektronica tot geavanceerde industriële machines. Wanneer toepassingen echter niet alleen precisie maar ook aanzienlijke kracht vereisen om zware lasten te verplaatsen, wrijving te overwinnen of onder spanning de positie te behouden, kan een stenaard stappenmotor onvoldoende blijken. Dit is waar de categorie van stappenmotoren met hoog koppel wordt kritisch.
In de context van stappenmotoren verwijst ‘hoog koppel’ naar het vermogen van de motor om een superieure rotatiekracht te genereren in vergelijking met standaardmotoren van een vergelijkbare fysieke grootte of hetzelfde frame. Koppel is de fundamentele maatstaf voor de kracht van een motor en bepaalt hoeveel belasting deze kan versnellen, rijden en stationair houden. Het belang van een hoog koppel kan bij veeleisende toepassingen niet genoeg worden benadrukt. In de robotica is een hoog koppel bijvoorbeeld essentieel voor gewrichtsactuatoren die het gewicht van een robotarm en zijn lading moeten dragen. Bij CNC-bewerkingen zorgt dit ervoor dat het snijgereedschap nauwkeurig door het materiaal kan bewegen zonder dat het vastloopt. In essentie, Stappenmotoren met hoog koppel overbruggen de kloof tussen de behoefte aan uiterste nauwkeurigheid en de eis aan aanzienlijk mechanisch vermogen , waardoor innovatie mogelijk wordt gemaakt op terreinen die beide vereisen.
Om de voordelen van stappenmotoren met hoog koppel ten volle te kunnen waarderen, moet men eerst de basisprincipes begrijpen die van toepassing zijn op alle stappenmotoren. In tegenstelling tot standaard DC-motoren die continu draaien wanneer er spanning op wordt toegepast, beweegt een stappenmotor in vaste hoekstappen, ook wel stappen genoemd. De interne structuur van de motor bestaat uit een stationair deel (de stator) met meerdere elektromagnetische spoelen en een roterend deel (de rotor), dat doorgaans permanente magneten of een magnetisch permeabele kern bevat. Door de statorspoelen in een specifieke volgorde te bekrachtigen, wordt een magnetisch veld gecreëerd dat de rotor aantrekt, waardoor deze op één lijn komt met het veld en dus onder een precieze hoek roteert bij elke puls die wordt ontvangen van een controller.
Er zijn verschillende fundamentele typen stappenmotoren, elk met verschillende operationele kenmerken. Permanente magneet (PM) stappenmotoren zijn voorzien van een rotor met permanente magneten, die een goed houdkoppel en een relatief grote staphoek bieden, maar ze bieden vaak een lagere resolutie en koppel in vergelijking met andere typen. Variabele Reluctantie (VR) stappenmotoren een rotor van zacht ijzer hebben die uitgelijnd is met het magnetische veldpad met de minste weerstand (magnetische weerstand); deze komen tegenwoordig minder vaak voor. Het meest voorkomende type, vooral in toepassingen met hoge prestaties, is het Hybride stappenmotor . Dit ontwerp combineert de principes van zowel PM- als VR-motoren, waarbij gebruik wordt gemaakt van een permanente magneetrotor met tanden die samenwerken met de getande elektromagnetische stator. Deze hybride configuratie maakt zeer kleine staphoeken, een hoog koppel en een uitstekende positionele nauwkeurigheid mogelijk, waardoor dit het dominante ontwerp is stappenmotor met hoog koppel toepassingen.
Verschillende sleuteltermen zijn essentieel voor het begrijpen van de specificaties van stappenmotoren. De stap hoek definieert de hoekafstand die de as roteert bij elke enkele puls, gewoonlijk 1,8° (200 stappen/omwenteling) of 0,9° (400 stappen/omwenteling) voor hybride motoren. Houdmoment is het maximale koppel dat de motor kan uitoefenen wanneer hij stilstaat en de wikkelingen bekrachtigd zijn, wat een kritische waarde is voor a stappenmotor met hoog koppel omdat het aangeeft dat het in staat is een positie in te nemen tegen een externe kracht. Omgekeerd, vastzetkoppel is het koppel dat aanwezig is wanneer de motorwikkelingen niet worden bekrachtigd, veroorzaakt door de magnetische interactie tussen de permanente magneetrotor en de stator; dit zorgt voor een lichte passieve houdkracht.
In mechanische termen is koppel een maatstaf voor de rotatiekracht die op een object wordt uitgeoefend. Voor een stappenmotor is dit de rotatiekracht die de motoras kan genereren om beweging te veroorzaken of te weerstaan. Het is analoog aan het concept van kracht in een lineair systeem. Een hoog koppel duidt daarom op het vermogen van een motor om een sterke rotatiekracht te produceren. Dit is van het grootste belang voor toepassingen waarbij zware lasten moeten worden versneld, mechanismen met hoge wrijving moeten worden aangedreven of een nauwkeurige positionering onder constante externe druk moet worden gehandhaafd. Het is belangrijk om te onderscheiden dat a stappenmotor met hoog koppel is niet noodzakelijkerwijs een andere motorcategorie, maar eerder een aanduiding voor stappenmotoren die zijn ontworpen om koppelwaarden te leveren die aanzienlijk boven de standaardbasislijn liggen voor hun framegrootte.
Het koppel in stappenmotoren wordt doorgaans gemeten in Newton-meters (N·m) of ounce-inch (oz-in). De belangrijkste koppelspecificatie die op het datablad van een motor te vinden is, is de houdkoppel . Dit is het maximale koppel dat de motor bij stilstand kan produceren als de spoelen volledig bekrachtigd zijn. Het dient als een primaire indicator van de kracht van de motor. Een andere cruciale vertegenwoordiging is de koppelkromme , een grafiek die het beschikbare koppel van de motor uitzet tegen zijn rotatiesnelheid. Deze curve is van vitaal belang omdat het koppel van een stappenmotor afneemt naarmate de snelheid toeneemt als gevolg van de effecten van inductie en tegen-EMK. Het begrijpen van de stappenmotorsnelheid versus koppel Deze relatie is essentieel voor het selecteren van een motor die adequaat presteert over het gehele vereiste bedrijfsbereik van een toepassing, en ervoor zorgt dat deze niet afslaat bij hogere snelheden.
Het koppelvermogen van een stappenmotor is geen vaste waarde; het wordt beïnvloed door verschillende operationele en ontwerpfactoren. De stroom die aan de motorwikkelingen wordt geleverd, is een primaire driver; een hogere stroom resulteert over het algemeen in een sterker magnetisch veld en dus een hoger koppel, tot aan de ontwerplimieten van de motor. Ook de voedingsspanning speelt een cruciale rol, vooral bij hogere snelheden. Een hogere spanning zorgt ervoor dat de stroom sneller van richting verandert in de motorwikkelingen, waardoor het koppel bij hogere rotatiesnelheden behouden blijft. Het fysieke ontwerp van de motor, inclusief de kwaliteit van de magnetische materialen, het aantal statortanden en de luchtspleet tussen de rotor en de stator, zijn allemaal ontworpen om de koppelgeneratie te maximaliseren. Bijvoorbeeld, een NEMA 23 stappenmotor met hoog koppel zal worden ontworpen met deze factoren geoptimaliseerd om meer koppel te leveren dan een standaard NEMA 23-motor.
Het belangrijkste voordeel van het gebruik van een stappenmotor met hoog koppel is de aanzienlijke toename van het mechanische vermogen dat beschikbaar is voor motion control-taken. Deze verbeterde mogelijkheden vertalen zich in een aantal belangrijke voordelen die cruciaal zijn voor het succes van veeleisende toepassingen. Het meest duidelijke voordeel is het vermogen om grotere traagheidsbelastingen aan te kunnen en aanzienlijke wrijving te overwinnen. In systemen zoals CNC-routers of geautomatiseerde transportbanden moet de motor niet alleen de gereedschapskop of band verplaatsen, maar ook de massa snel versnellen en vertragen. Een motor met onvoldoende koppel zou onder dergelijke eisen afslaan of stappen verliezen, terwijl a stappenmotor met hoog koppel biedt de noodzakelijke kracht om een betrouwbare werking te garanderen, waardoor het scala aan mogelijke toepassingen wordt uitgebreid en de robuustheid van bestaande toepassingen wordt verbeterd.
Verbeterde nauwkeurigheid en een aanzienlijke vermindering van positiefouten zijn een ander groot voordeel. De hoge houdkoppel Kenmerkend voor deze motoren zorgt ervoor dat ze hun positie stevig kunnen behouden tegen onverwachte externe krachten of trillingen. Dit is van cruciaal belang in toepassingen zoals precisieassemblage of positionering van medische apparatuur, waarbij zelfs een kleine afwijking tot defecten kan leiden. Bovendien helpt de aanzienlijke koppelreserve afslaan te voorkomen, wat een veelvoorkomende oorzaak is van verloren stappen. Verloren stappen treden op wanneer de motor er niet in slaagt een opgedragen beweging uit te voeren, wat leidt tot een accumulerende positiefout die het open-lussysteem niet kan detecteren. Door ruim binnen zijn koppelcapaciteit te werken, kan a stappenmotor met hoog koppel minimaliseert dit risico aanzienlijk en zorgt ervoor dat de werkelijke positie van de machine altijd overeenkomt met de beoogde positie die door de controller wordt opgedragen.
Ten slotte bieden deze motoren een grotere ontwerpflexibiliteit en een lange levensduur. Ingenieurs worden niet gedwongen een motor tot het uiterste te drijven, wat vaak leidt tot oververhitting en een kortere levensduur. In plaats daarvan kunnen ze een stappenmotor met hoog koppel dat efficiënt en koel opereert binnen zijn prestatiebereik. Dankzij deze vrije ruimte kunnen systemen variabele belastingen of onverwachte obstakels op een elegantere manier verwerken zonder catastrofaal falen. De mogelijkheid om een compacter motorframe te gebruiken, zoals een NEMA 23 stappenmotor met hoog koppel Het bereiken van de prestaties waarvoor anders een groter, omslachtiger frame nodig zou zijn, is een direct voordeel van deze technologie, die meer gestroomlijnde en efficiënte mechanische ontwerpen mogelijk maakt.
De unieke combinatie van precisie, betrouwbaarheid en kracht maakt stappenmotor met hoog koppels geschikt voor een breed scala aan toepassingen in tal van industrieën. Hun vermogen om gecontroleerde bewegingen in discrete stappen te bieden zonder feedbacksensoren vereenvoudigt het systeemontwerp en garandeert tegelijkertijd nauwkeurigheid.
Op het gebied van Robotica Deze motoren zijn de favoriete actuatoren voor gewrichtsbewegingen, vooral in robotarmen die zware ladingen moeten kunnen verwerken. De stappenmotor met hoog koppel for robotics biedt de noodzakelijke kracht om ledematen en grijpers precies te articuleren en tegelijkertijd het gewicht van de arm zelf en het object dat hij draagt te ondersteunen. Dit is essentieel voor taken variërend van industriële assemblage en lassen tot complexe laboratoriumautomatisering. De houdkoppel zorgt ervoor dat de arm zijn positie kan behouden zonder te gaan afdrijven, zelfs wanneer deze is ingeschakeld maar niet in beweging is.
CNC-machines vertegenwoordigen een klassieke toepassing waarbij precisie en kracht niet onderhandelbaar zijn. EEN stappenmotor voor CNC-router Bij toepassingen moet het snijgereedschap door materialen als metaal, hout of plastic worden bewogen, waarbij aanzienlijke weerstand wordt ondervonden. De stappenmotor met hoog koppel zorgt ervoor dat het gereedschapspad nauwkeurig wordt gevolgd zonder dat het vastloopt, wat het werkstuk kapot zou maken en mogelijk de machine zou beschadigen. Dezelfde principes zijn van toepassing op andere CNC-apparatuur zoals draaibanken, plasmasnijders en lasersnijders, waarbij consistente prestaties van cruciaal belang zijn voor kwaliteit en productiviteit.
De wereld van 3D-printen is sterk afhankelijk van stappenmotoren voor zowel asbeweging als filamentextrusie. Naarmate printers groter en sneller worden, en materialen als ABS en nylon meer kracht nodig hebben om door de extruder te duwen, stijgt de vraag naar koppel. EEN stappenmotor voor 3D-printers hoog koppel zorgt voor een nauwkeurige uitlijning van de lagen door gemiste stappen op de X-, Y- en Z-assen te voorkomen, terwijl een extrudermotor met hoog koppel zorgt voor een consistente filamentstroom, wat leidt tot een hogere printkwaliteit en betrouwbaarheid.
Industriële automatisering is een breed domein waar deze motoren alomtegenwoordig zijn. Ze drijven transportsystemen aan verpakkingsmachines , bedien de kleppen en plaats de componenten erin pick & place-machines . In deze omgevingen zijn duurzaamheid en continu gebruik van het grootste belang. Het gebruik van een industriële stappenmotor met hoog koppel zorgt voor betrouwbaarheid op de lange termijn en de mogelijkheid om repetitieve taken miljoenen keren met hoge nauwkeurigheid uit te voeren. Voor ruwe omgevingen zijn opties zoals een IP65 stappenmotor met hoog koppel of zelfs een Stappenmotor voor buitengebruik, IP67-classificatie zijn beschikbaar om het binnendringen van stof en vocht te weerstaan.
Medische apparatuur vereist het hoogste niveau van precisie, netheid en betrouwbaarheid. Stappenmotoren met hoog koppel worden gebruikt in apparaten zoals geautomatiseerde analysatoren, infuuspompen, chirurgische robots en beeldvormingsapparatuur. Hun precieze beweging regelt de monsterbehandeling, de doseringsafgifte en de positionering van sensoren en gereedschappen. In veel gevallen is een geluidsarme stappenmotor voor laboratoriumautomatisering of medisch gebruik is gespecificeerd om een stille werkomgeving te garanderen. Het voorspelbare karakter van de werking van stappenmotoren, gecombineerd met een hoog koppel, maakt ze ideaal voor deze gevoelige toepassingen.
Daarnaast komen er voortdurend gespecialiseerde toepassingen bij. Ze worden gebruikt bij actuatoren voor auto's voor spiegelverstelling en gasbediening, in drukmachines voor nauwkeurige papierinvoer, en in duurzame energiesystemen zoals stappenmotor op zonne-energie met hoog koppel eenheden die panelen aanpassen om de zon en naar binnen te volgen Controle van de pitch van windturbines mechanismen.
Het juiste selecteren stappenmotor met hoog koppel voor een specifieke toepassing vereist een systematische evaluatie van verschillende sleutelparameters. Een verkeerde keuze kan leiden tot slechte prestaties, afslaan van de motor, oververhitting of voortijdige uitval.
De meest kritische stap is het nauwkeurig bepalen van de koppelvereisten van de toepassing. Hierbij wordt het koppel berekend dat nodig is om de traagheid van de last te versnellen en eventuele voortdurende krachten, zoals wrijving of zwaartekracht, te overwinnen. De motor moet een koppel leveren dat het door de toepassing vereiste piekkoppel over het gehele operationele snelheidsbereik overschrijdt, zoals gedefinieerd door de stappenmotorsnelheid versus koppel bocht. Het is een beste praktijk om een veiligheidsmarge van 30-50% boven de berekende vereiste op te nemen om rekening te houden met onvoorziene variabelen zoals wrijvingsveranderingen of productietoleranties. Het raadplegen van een stappenmotor koppelgrafiek Voor een kandidaatmotor is het essentieel om te verifiëren dat de koppelcurve voldoet aan de eisen van de toepassing, zowel bij lage als bij hoge snelheden.
De fysieke grootte van de motor, vaak gestandaardiseerd door NEMA framegroottes (bijv. NEMA 17, NEMA 23, NEMA 34) geven een algemene indicatie van het vermogen ervan. EEN NEMA 23 stappenmotor met hoog koppel levert doorgaans meer koppel dan een NEMA 17-motor, terwijl a stappenmotor met groot frame zoals een NEMA 34 in staat zal zijn tot een nog hoger koppel. De framegrootte alleen is echter geen perfecte indicator; het interne ontwerp en de kwaliteit van de materialen hebben een grote invloed op het werkelijke koppel. De selectie moet de koppelvereiste in evenwicht brengen met de beschikbare ruimte en montagebeperkingen binnen de machine.
Het afstemmen van de elektrische specificaties van de motor op de driver en de voeding is cruciaal voor het behalen van de nominale prestaties. De motor huidige beoordeling is de maximale stroom per fase die het kan verwerken zonder oververhitting. De bestuurder moet in staat zijn deze stroom te leveren. Het aanbod spanning is even belangrijk. Een hogere spanning zorgt ervoor dat de stroom snel toeneemt in de motorwikkelingen, wat nodig is om het koppel bij hogere snelheden te behouden. Het bedienen van een motor met een voeding met een te lage spanning zal resulteren in een snelle afname van het koppel naarmate de snelheid toeneemt, een fenomeen dat duidelijk zichtbaar is in de koppelcurve van de motor.
De stap hoek bepaalt de intrinsieke resolutie van de motor. Een standaardmotor van 1,8° levert 200 stappen per omwenteling, terwijl een motor van 0,9° 400 stappen levert. Voor toepassingen die een zeer fijne positiecontrole vereisen, een kleinere staphoek of het gebruik van een driver die daartoe in staat is microstappen is voordelig. Het is belangrijk om te onthouden dat hoewel microstappen de resolutie verhoogt, dit de nauwkeurigheid niet significant vergroot; het koppel dat wordt geproduceerd in een microstappositie is lager dan in een volledige stappositie.
De operating environment must be considered to ensure reliability. Factors such as ambient temperature, presence of contaminants like dust or moisture, and exposure to vibrations can impact motor selection. For example, in a wash-down environment or an outdoor application, an IP65 stappenmotor met hoog koppel of hoger nodig zou zijn om schade te voorkomen. Hoge omgevingstemperaturen vereisen mogelijk een reductie van de motor (waarbij deze onder de maximale koppelspecificatie wordt gebruikt) om oververhitting te voorkomen, of het selecteren van een motor met een hogere temperatuurklasse.
Een specifiek model selecteren uit het grote aanbod aan beschikbare modellen stappenmotor met hoog koppels kan ontmoedigend zijn. Het volgende overzicht presenteert een reeks producten, gecategoriseerd op basis van hun typische toepassingssterkte, waarbij de belangrijkste kenmerken worden benadrukt zonder te verwijzen naar specifieke merknamen. Deze lijst illustreert de diversiteit die beschikbaar is voor ingenieurs en ontwerpers.
NEMA 17 stappenmotor met hoog koppel: Deze compacte motor is een werkpaard in toepassingen waar de ruimte beperkt is, maar de prestaties niet in het gedrang mogen komen. Het is uitzonderlijk populair in het hogere segment 3D printen en kleinschalige automatisering. Moderne versies bieden koppelwaarden die kunnen wedijveren met grotere, oudere modellen, waardoor ze ideaal zijn voor precisie-instrumenten en compact zijn robotica gewrichten.
NEMA 23 stappenmotor met hoog koppel: Wellicht de meest voorkomende framegrootte voor veeleisende tafeltoepassingen, de NEMA 23 stappenmotor met hoog koppel biedt een uitstekende balans tussen grootte, kracht en kosten. Het is de beste keuze voor CNC-routers , kleine freesmachines en groter 3D-printers . Door zijn veelzijdigheid is hij geschikt voor een breed scala aan toepassingen industriële automatisering taken.
NEMA 34 stappenmotor met hoog koppel: Wanneer substantiële kracht vereist is, is dit het geval stappenmotor met groot frame is de volgende stap omhoog. Het is ontworpen voor zwaar gebruik CNC machines, industriële portalen en automatiseringssystemen die aanzienlijke lasten moeten verplaatsen. Deze motoren zijn essentieel voor toepassingen waarbij een hoge stuwkracht nodig is, zoals bij groot formaat drukmachines .
Aangepaste stappenmotor: Dit type integreert een planetaire versnellingsbak met een standaard hybride stappenmotor . De tandwielreductie vermenigvuldigt het uitgangskoppel aanzienlijk terwijl de uitgangssnelheid wordt verlaagd, waardoor een uitzonderlijk vermogen ontstaat motor met laag toerental en hoog koppel . Dit is ideaal voor toepassingen zoals transportbandaandrijvingen, klepactuatoren en elk systeem dat veel kracht vereist bij lage, gecontroleerde snelheden.
Waterdichte stappenmotor (IP65/IP67): Ontworpen voor zware omstandigheden, een IP65 stappenmotor met hoog koppel is stofdicht en beschermd tegen waterstralen, waardoor het geschikt is voor de verwerking van voedsel en dranken, verpakkingsmachines en buitentoepassingen. Een Stappenmotor voor buitengebruik, IP67-classificatie biedt nog meer bescherming tegen tijdelijke onderdompeling, perfect voor zonne-tracker systemen of landbouwapparatuur.
Gesloten lus stappenmotor met hoog koppel: Dit geavanceerde systeem combineert a stappenmotor met hoog koppel met een geïntegreerde encoder. De encoder geeft realtime feedback aan een gespecialiseerde driver, waardoor een gesloten lus systeem dat gemiste stappen kan detecteren en corrigeren. Deze technologie biedt de eenvoud van een stappenmotor met de betrouwbaarheid en snelle prestaties van een servo, ideaal voor bedrijfskritische toepassingen. medische apparatuur en hoge doorvoer pick & place-machines .
Stappenmotor met hoog koppel, geïntegreerde encoder en vertragingskast: Dit vertegenwoordigt een hoogontwikkelde oplossing die een motor, een vertragingskast voor koppelvermenigvuldiging en een encoder voor positionele feedback in één enkele eenheid combineert. Dit motor met geïntegreerde encoder en vertragingskast vereenvoudigt het ontwerp en de installatie voor complexe bewegingstaken en biedt een hoog koppel, lage snelheid en regelzekerheid in een compact pakket voor toepassingen zoals robotarmen and actuatoren voor auto's .
Ultra-precieze stappenmotor: Dese motors are engineered for applications requiring the utmost accuracy and smoothness, such as in medisch apparaat productie- of laboratoriumautomatisering. Ze hebben vaak zeer fijne staphoeken en zijn geoptimaliseerd voor minimale trillingen en geluid, waardoor ze in aanmerking komen als een geluidsarme stappenmotor voor laboratoriumautomatisering .
Gecertificeerde stappenmotor voor gereguleerde industrieën: Motoren die worden gebruikt in medische, ruimtevaart- of publiekgerichte apparatuur vereisen vaak formele certificeringen. EEN stappenmotor met CE / UL / RoHS-certificeringen toont aan dat wordt voldaan aan de internationale veiligheids-, milieu- en elektromagnetische compatibiliteitsnormen, wat voor velen een voorwaarde is medisch apparaat en consumentgerichte toepassingen.
Aangepaste hybride stappenmotor met hoog koppel: Voor toepassingen met unieke mechanische, elektrische of omgevingsbeperkingen: op maat gemaakte hybride stappenmotor met hoog koppel kan de enige oplossing zijn. Leveranciers kunnen standaardontwerpen aanpassen met speciale as maten , connectoren, wikkelingen, coatings of magnetische materialen om aan exacte prestatie- en vormfactorvereisten te voldoen.
Het behalen van de beoordeelde prestatie van a stappenmotor met hoog koppel is volledig afhankelijk van de koppeling met de juiste aandrijfelektronica. De motor zelf is een passief apparaat; de driver en de voeding bepalen hoe effectief elektrische energie wordt omgezet in mechanische beweging.
Stappenmotorstuurprogramma's vormen de kritische link tussen een stuursignaal en de motor. Ze nemen stap- en richtingspulsen met laag vermogen van een bewegingscontroller en vertalen deze in de krachtige stroom die nodig is om de motorwikkelingen aan te drijven. Voor stappenmotor met hoog koppels , is de keuze van de drivertechnologie van cruciaal belang. Basisdrivers werken in volledige of halve stappen, wat voor sommige toepassingen voldoende kan zijn, maar vaak tot merkbare trillingen leidt. Microstepping-chauffeurs zijn sterk aanbevolen. Ze verdelen elke volledige stap elektronisch in kleinere microstappen, wat resulteert in aanzienlijk vloeiendere bewegingen, minder hoorbare ruis en verbeterde stabiliteit bij lage snelheden. Het vermogen van een bestuurder om een consistente stroom te leveren is van cruciaal belang voor het behoud van koppel, vooral bij hogere snelheden.
Voedingen moeten met zorg worden geselecteerd. De voedingsspanning moet aanzienlijk hoger zijn dan de nominale spanning van de motor om de bij hoge snelheid gegenereerde tegen-EMK te overwinnen. Een algemene vuistregel is om een voedingsspanning te gebruiken die 5 tot 20 maal de nominale spanning van de motor bedraagt, zolang de maximale spanning van de bestuurder niet wordt overschreden. De voeding moet ook in staat zijn de door de motor benodigde stroom te leveren. De stroomsterkte (in ampère) van de voeding moet minimaal gelijk zijn aan de som van de stroom die nodig is voor alle aangedreven motoren, hoewel een marge aan te raden is voor piekverbruik.
Controlesignalen zijn de digitale commando's die beweging dicteren. De overgrote meerderheid van moderne stappenmotoren gebruiken een eenvoudige interface met twee signalen: STEP en DIRECTION. Elke puls op de STEP-lijn geeft de motor het commando om één stap (een stap of microstap) te verplaatsen. De frequentie van deze pulsen bepaalt de snelheid van de motor. Het niveau (hoog of laag) op de DIRECTION-lijn bepaalt de draairichting. Deze eenvoud maakt het besturen van een stappenmotor met hoog koppel eenvoudig voor microcontrollers en PLC's.
Bedrading en aansluitingen moeten correct worden uitgevoerd om de betrouwbaarheid te garanderen en schade te voorkomen. Het gebruik van draden met een adequate dikte is essentieel om de motorstroom te kunnen verwerken zonder overmatige spanningsval of oververhitting. De verbindingen met de bestuurder moeten veilig zijn en het is een goede gewoonte om afgeschermde kabels te gebruiken voor de STEP- en DIRECTION-signalen om ze te beschermen tegen elektrische ruis, die onregelmatig motorgedrag kan veroorzaken. Een goede aarding van de driver, de voeding en het motorframe is ook van cruciaal belang voor een stabiele werking.
Zelfs met een goed geselecteerde stappenmotor met hoog koppel en aandrijfsysteem, kunnen er problemen optreden tijdens het gebruik. Het begrijpen van de hoofdoorzaken van veelvoorkomende problemen is essentieel voor het behouden van de betrouwbaarheid en prestaties van het systeem.
Motorstalling is een van de meest voorkomende problemen. Het treedt op wanneer het door de belasting gevraagde koppel groter is dan het koppel dat de motor bij een gegeven snelheid kan produceren. De voornaamste oorzaak is een onjuiste afstemming tussen het vermogen van de motor en de vereisten van de toepassing, wat vaak aan het licht komt door de stappenmotorsnelheid versus koppel kromme. Afslaan kan ook worden veroorzaakt door onvoldoende elektrische voeding. Een te kleine voeding die niet voldoende spanning kan leveren, zal een snelle koppeldaling veroorzaken naarmate de snelheid toeneemt. Op dezelfde manier zal een driver die is ingesteld op een stroomlimiet die lager is dan het motorvermogen, voorkomen dat de motor zijn volledige koppel genereert. Oplossingen zijn onder meer het herberekenen van de koppelvereisten met een grotere veiligheidsmarge, het selecteren van een motor met een hogere koppelcurve, het verhogen van de voedingsspanning binnen de limieten van de bestuurder, of het correct configureren van de stroomoutput van de bestuurder.
Oververhitting is een natuurlijk kenmerk van stappenmotoren, omdat ze zelfs als ze stilstaan stroom trekken. Overmatige hitte kan echter de isolatie aantasten en de levensduur verkorten levenscyclus van stappenmotoren . De meest voorkomende oorzaak is dat de motor gedurende langere perioden op of nabij de maximale stroomsterkte draait. Het gebruik van overmatige stroom om meer koppel te bereiken dan waarvoor de motor is ontworpen, zal warmte genereren. Andere oorzaken zijn onder meer een hoge stapsnelheid bij lage snelheden waarbij de koppelproductie hoog is, of onvoldoende koeling in de toepassingsomgeving. Om oververhitting te voorkomen, moet u ervoor zorgen dat de stroom van de driver correct is ingesteld (vaak op de nominale stroom van de motor) en niet onnodig hoog. Het verbeteren van de luchtstroom rond de motor of het toevoegen van een koellichaam kan effectief zijn. Voor toepassingen met continu gebruik die een hoog koppel vereisen, kan het selecteren van een motor met een hoger koppel dan strikt noodzakelijk ervoor zorgen dat deze koeler draait.
Trillingen en lawaai zijn inherent aan het discrete stapkarakter van stappenmotoren, maar kunnen problematisch worden bij precisietoepassingen. Deze problemen zijn het meest uitgesproken bij lage snelheden en bij de resonantiefrequenties van de motor. Trillingen kunnen leiden tot voortijdige mechanische slijtage en de positioneringsnauwkeurigheid in gevoelige systemen verminderen. De primaire oplossing is het gebruik van microstappen drivers, die de beweging tussen volledige stappen vloeiend maken, waardoor trillingen en hoorbaar geluid aanzienlijk worden verminderd. Mechanisch gezien kan het garanderen van een veilige montage van de motor en een goede koppeling met de belasting trillingen dempen. Als resonantie bij specifieke snelheden een probleem is, kan het besturingssysteem worden geprogrammeerd om snel door die snelheden heen te accelereren in plaats van er gestaag binnen te werken.
Onnauwkeurige positionering in een open-lus-stappensysteem duidt dit vrijwel altijd op verloren stappen. Dit gebeurt wanneer de motor er niet in slaagt naar een opgedragen positie te bewegen omdat het belastingskoppel het beschikbare motorkoppel overschrijdt. Het systeem is zich niet bewust van de fout, wat leidt tot een toenemende positionele drift. De hoofdoorzaak is vaak onvoldoende koppel, vergelijkbaar met afslaan. Het kan echter ook worden veroorzaakt door plotselinge schokbelastingen of buitensporige acceleratiesnelheden die een onmiddellijk koppel vereisen dat verder gaat dan het vermogen van de motor. Om onnauwkeurigheid te voorkomen, moet de initiële motorselectie worden geverifieerd aan de hand van de koppelcurve. Voor toepassingen waarbij gemiste stappen onaanvaardbaar zijn, is de meest robuuste oplossing de overstap naar een stappenmotor met gesloten lus en hoog koppel systeem. Dit systeem maakt gebruik van een encoder om de positie te bewaken en corrigeert automatisch eventuele gemiste stappen, waardoor de nauwkeurigheid van een stepper met de betrouwbaarheid van een servo wordt gegarandeerd.
De field of stappenmotor met hoog koppels is niet statisch; het evolueert om te voldoen aan de eisen van steeds geavanceerdere automatisering en precisie-engineering. Verschillende belangrijke trends bepalen hun toekomstige ontwikkeling.
Vooruitgang in motormaterialen en ontwerp leiden tot voortdurende verbeteringen in de vermogensdichtheid. Het gebruik van permanente magneten van hogere kwaliteit, zoals neodymium, en verbeterd lamineringsstaal voor de stator- en rotorkernen, stelt fabrikanten in staat meer koppel uit een bepaalde framegrootte te halen. Deze trend naar miniaturisering zonder concessies te doen aan de prestaties maakt het ontwerp van compactere en krachtigere machines mogelijk. Onderzoek naar nieuwe magnetische materialen en geoptimaliseerde elektromagnetische geometrieën belooft verdere winst op het gebied van efficiëntie en koppel.
Integratie met geavanceerde besturingssystemen is een dominante trend, grotendeels gedreven door de toenemende adoptie van gesloten lus technologie. Het onderscheid tussen stepper- en servosystemen vervaagt stappenmotor met encoder oplossingen worden kosteneffectiever en wijdverspreider. Toekomstige drivers zullen over geavanceerdere algoritmen beschikken die niet alleen positiefouten corrigeren, maar ook actief trillingen dempen en het stroomverbruik in realtime optimaliseren op basis van de belasting. Deze intelligente besturing maximaliseert de motor koppel beschikbaar terwijl de soepelheid en efficiëntie worden verbeterd.
De toenemende vraag naar energiezuinige motoren met hoog koppel beïnvloedt de ontwerpprioriteiten. Nu duurzaamheid een belangrijk technisch probleem wordt, wordt er gestreefd naar een vermindering van het inherente energieverbruik van stappenmotoren, die doorgaans zelfs in stilstand de volledige stroom verbruiken. Er zijn nieuwe drivertechnologieën in opkomst die de motorstroom dynamisch kunnen verminderen wanneer deze vol is houdkoppel is niet nodig, waardoor het energieverbruik en de warmteontwikkeling aanzienlijk worden verminderd zonder dat dit ten koste gaat van de prestaties. Dit is vooral belangrijk voor op batterijen werkende toepassingen en grootschalige industriële installaties waar de energiekosten aanzienlijk zijn.
Stappenmotoren met hoog koppel zijn een cruciale technologie voor een breed spectrum aan moderne toepassingen die een combinatie vereisen van nauwkeurige positionele controle en substantiële mechanische kracht. Van de gelede gewrichten van robotarmen aan de krachtige drijfveren van CNC-routers en de betrouwbare actuatoren in medische apparatuur bieden deze motoren een unieke oplossing die prestaties, eenvoud en kosteneffectiviteit in evenwicht brengt.
De effective selection and use of a stappenmotor met hoog koppel hangt af van een grondig begrip van de vereisten van de toepassing, met name van het benodigde koppel over het gehele bedrijfssnelheidsbereik. Een zorgvuldige afweging van factoren zoals motorgrootte, elektrische specificaties en omgevingsomstandigheden is essentieel. Bovendien is het bereiken van optimale prestaties onmogelijk zonder de motor te koppelen aan een correct op elkaar afgestemde driver en voeding.
1. Inleiding: deconstructie van de paardenkracht van AC-inductiemotoren De AC-inductiemotor is een van de m...
LEES MEER1. Inleiding In de moderne industriële automatisering, de bouw van datacentra, de ontwikkeling van consumentenelektronica...
LEES MEERStappenmotoren vormen een hoeksteen van moderne bewegingscontrole en bieden nauwkeurige positionering en re...
LEES MEERHet industriële motorlandschap ondergaat een aanzienlijke transformatie, aangedreven door de meedogenloze ...
LEES MEERGerelateerde producten
Gebouw 10, nr. 199, Jinfeng Road, Suzhou Hightech, provincie Jiangsu, China
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsAppen
WhatsAppen
Auteursrecht © Suzhou Retek Elektrisch Technologieco., Ltd. Alle rechten voorbehouden. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













